
Eine Ladestation für Elektroautos ist eine glorifizierte Drehstromsteckdose. Damit die Ladestation den Strom anschaltet muss man ihr ein Auto vorgaukeln — dazu nutzt man einen Autosimulator. Mit dem hier vorgestellten Simulator kann man z.B.
Natürlich kann man aber auch ein Waffeleisen damit betreiben:
Bevor eine Ladesäule den Ladestrom freischaltet, wird zunächst eine einfache Kommunikation mit dem Elektroauto aufgebaut. Dabei wird z.B. geprüft, ob wirklich ein Elektroauto angeschlossen ist. Außerdem wird dem Elektroauto auch der maximal verfügbare Ladestrom von der Ladesäule mitgeteilt.
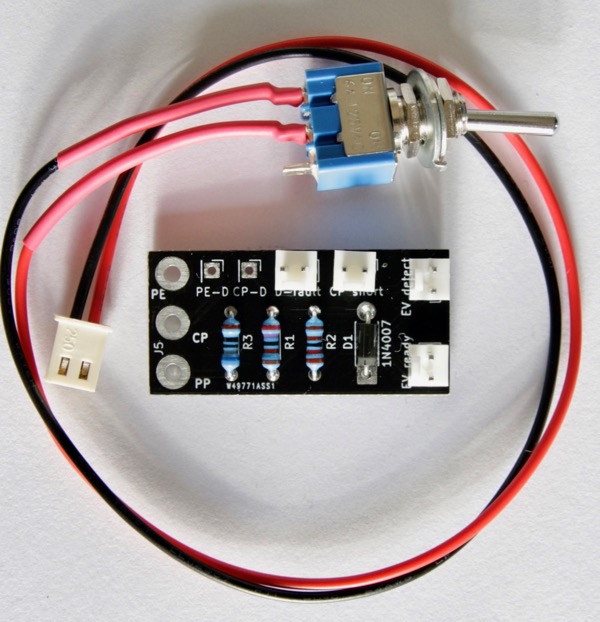
Der Simulator setzt das Ladeprotokoll nach DIN EN 61851-1:2012 bzw. J1772 um. Die passende Platine kann für eigene Experimente gekauft werden, siehe Bezugsquelle. Die Platine entstand, weil ich eine Softwareschnittstelle zu einer Wallbox entwickeln wollte. Da der Ladevorgang das mindestens das Durchlaufen der Zustände A-C vorsieht hab ich einen kleinen Simulator gebraucht, der auf dem Schreibtisch liegen kann und ein Auto simuliert. Mit diesem Simulator kann man alle Ladezustände eines Elektroautos simulieren und die Reaktion der Wallbox prüfen. Über Schalter lassen sich verschiedene Zustände einstellen sowie Fehler wie eine defekte Diode und einen Kurzschluss zwischen CP und PE simulieren. Ebenso kann man einen Ladevorgang simulieren und dann die notwenigen Sicherheitsprüfungen an der Wallbox durchführen.
Eine Typ 2-Steckdose beinhaltet nicht nur die Stromversorgung, sondern auch zwei Kommunikationsleitungen. Über diese werden folgende Funktionen koordiniert (vgl. DIN EN 61851-1:2012):
Ein Typ2-Stecker benutzt dafür folgenden Leitungen:
Die Kommunikation ist sehr simpel — auf der Seite der Ladestation reichen ein paar analoge Bauteile aus, siehe z.B. AnalogEVSE. Auf der Seite des Fahrzeugs sind ebenfalls nur sehr wenige Komponenten erforderlich.
Der maximal zulässige Ladestrom, den das Kabel verkraftet, wird über einen Widerstand zwischen PP und der Schutzerde PE kodiert. Nach DIN EN 61851-1:2012 sind folgende Widerstände zulässig:
| Widerstand | Maximaler Ladestrom |
|---|---|
| 100 Ohm | 63 A |
| 220 Ohm | 32 A |
| 680 Ohm | 20 A |
| 1500 Ohm | 13 A |
Werte kleiner als 75 Ohm oder größer als 2200 Ohm werden als Fehler interpretiert. Dieser Widerstand beschreibt den maximalen Ladestrom: Wenn dieser überschritten wird kommt es zu Schäden am Kabel. Der reale Ladestrom muss also kleiner bleiben. Der Widerstand muss eine Belastbarkeit von mehr als 0,5 Watt haben.
Üblicherweise wird ein entsprechender Widerstand in den Typ2-Stecker selbst integriert. Das Gehäuse des Steckers bietet viel Platz für einen Widerstand — mit etwas Schrumpfschlauch entsteht so ein robuster und sicherer Aufbau. Die EVSim-Platine bietet aber ebenso einen Platz für den Widerstand.
Der Control Pilot setzt die restlichen Funktionen um. Dabei schaltet das Elektroauto zwei verschiedene Widerstände zwischen CP und PE. Zusätzlich wird eine Diode in CP gesetzt. Die Wallbox erzeugt ein Kleinspannungssignal, welches dann durch die Widerstände und die Diode verändert wird. Dadurch können verschiedene Zustände detektiert und der momentan verfügbare Ladestrom kommuniziert werden.
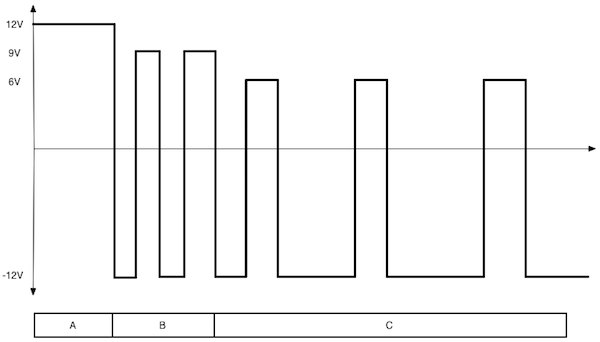
Die folgenden sechs Zustände sind möglich:
| Zustand | Fzg. angeschlossen | Laden möglich | Spannung CP-PE | Frequenz |
|---|---|---|---|---|
| A | Nein | Nein | 12V | DC |
| B | Ja | Nein | 9V/-12V | 1 kHz |
| C | Ja | Ja | 6V/-12V | 1 kHz |
| D | Ja | Ja | 3V/-12V | 1 kHz |
| E | Ja | Nein | 0V | - |
| F | Ja | Nein | - | - |
Im Zustand A ist kein Fahrzeug angeschlossen. Die Wallbox legt eine Gleichspannung von 12V zwischen CP und PE an. Sobald ein Kabel eingesteckt wird, wechselt die Wallbox in den Status B: Die Gleichspannung wird durch ein PWM-Signal mit 1kHz ersetzt, zwischen -12V und 12V. Die Diode im Fahrzeug bewirkt, das der negative Anteil verworfen wird. Auf diese Weise kann die Wallbox ein Fahrzeug von einem zufälligen Kurzschluss (z.B. Kabel liegt im Regen) unterscheiden. Im Fahrzeug wird außerdem ein Widerstand von 2k7 Ohm zwischen CP und PE geschaltet. Damit sinkt die positive Spannung auf 9V ab. Das Fahrzeug ist nun korrekt angeschlossen und der Zustand B erreicht.
Sobald das Fahrzeug zum Laden bereit ist wird ein weiterer Widerstand (1k2 Ohm) zwischen CP und PE geschaltet. Damit sinkt die CP-PE-Spannung auf 6V, der Zustand C ist erreicht. Die Wallbox schaltet den Ladestrom frei, der Ladevorgang beginnt. Für das Laden von Bleibatterien kann eine Lüftungsanforderung gesendet werden (Zustand D). Damit signalisiert ein Fahrzeug, das für einen Ladevorgang eine Belüftung notwendig ist — die Wallbox kann diese entweder sicherstellen oder den Ladevorgang abbrechen. Achtung: Dieser Anwendungsfall ist mittlererweile recht selten. Daher ist dieser Widerstand auf der Platine nicht vorgesehen.
Die Zustände E und F sind Fehlerzustände, in denen die Stromversorgung zum Elektroauto unterbrochen wird. E zeigt einen Kurzschluss zwischen CP und PE an. Der Zustand F kennzeichnet einen Ausfall der Wallbox: Zwischen CP und PE besteht keine Verbindung.
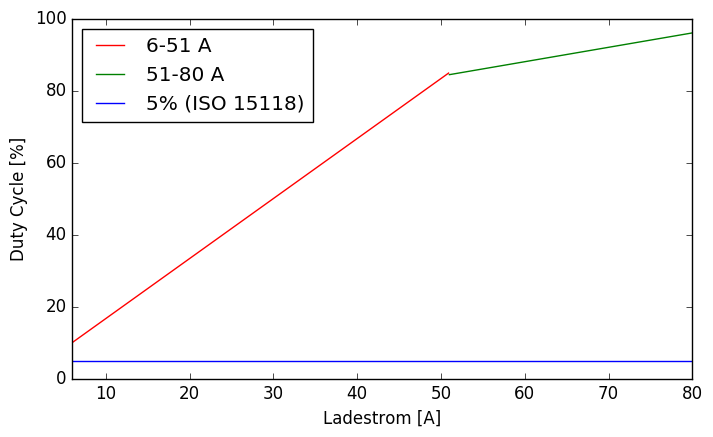
Die Ladesäule teilt dem Auto den zur Verfügung stehenden Ladestrom mit. Dafür wird der Duty Cycle des PWM-Signals angepasst. Dabei gibt es eine Besonderheit: Die ISO 15118 legt einen Duty Cycle von 5% fest, wenn der Ladevorgang digital ausgehandelt werden soll (z.B. bei CCS). Es gilt:
| Ladestrom | Duty Cycle (+/- 1%) |
|---|---|
| Digitales Protokoll | 5% |
| 6A - 51A | \[ dc = \frac{Strom [A]}{0.6} \] entspricht 10%–85% |
| 51A - 80A | \[dc = \frac{Strom [A]}{2.5} + 64\] entspricht 85%–96% |
Ein Duty Cycle kleiner 5% oder größer 96% ist nicht zulässig. Grafisch sieht das so aus:
Achtung: In die Versionen kleiner 0.5 hat sich ein Fehler eingeschlichen — diese Schaltungen funktionieren zwar, folgen aber dem Signalablauf des “Simplified Mode”. An einigen Ladereglern führt dies dazu, das der Ladestrom auf 10A begrenzt wird. Im Folgenden beschreibe ich die Version 0.5.
Der komplette Schaltplan (v0.5) ist hier (PDF). Die einzelnen Komponenten stelle ich im Folgenden vor. Zunächst einmal bietet die Platine eine Anschlußmöglichkeit für PP, CP und PE:

Daran können die entsprechenden Signalleitungen des Ladekabels an die Platine angeschlossen werden. Diese bietet für CP und PE wiederum einen separaten Anschluss an:
Dort kann man z.B. Messbuchsen verbinden, um den Control Pilot beobachten zu können. So kann man den Duty Cycle ausrechnen und z.B. nachprüfen, ob der Ladestrom von der Ladestation korrekt signalisiert wird. Diese Anschlussmöglichkeit kann aber auch ungenutzt bleiben.
Um den Strom des Ladekabels festzulegen wird ein Widerstand zwischen PP und PE benötigt. Dieser wird auf der Platine R3 genannt und wird mit 220 Ohm (min. 0,5 Watt, für 32 A Strombelastbarkeit) bzw. einem anderen Widerstandswert bestückt:
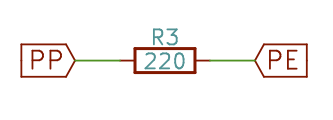
Normalerweise wird dieser Widerstand direkt im Typ2-Stecker montiert. Allerdings bietet die Platine auch die Möglichkeit, den Widerstand direkt auf die Platine zu löten — je nach Anwendungsfall ist das eine oder das andere praktischer.
Damit ein Ladestrom freigegeben wird, muss das Elektroauto das CP-Signal entsprechend ändern. Die Platine bietet dazu folgende Möglichkeiten:
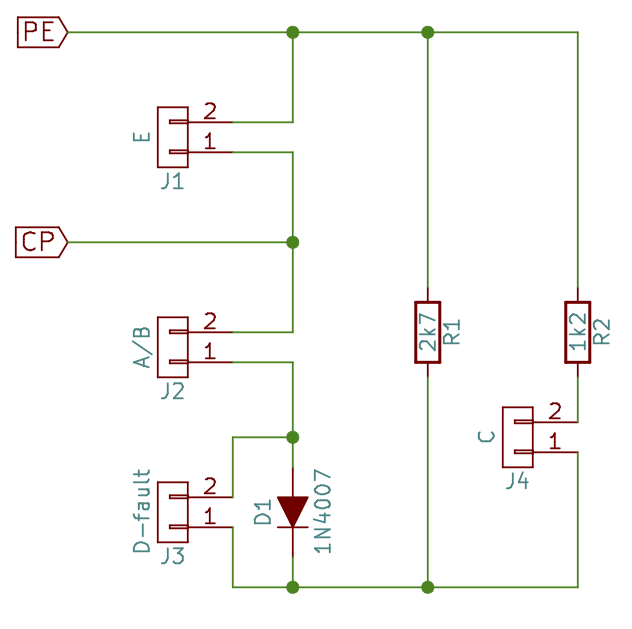
Über den Kontakt “E” kann man PE und CP kurzschließen. Eine Ladestation muss in diesem Fall die Ladung umgehend beenden bzw. den Ladestrom erst gar nicht freigeben. Ähnlich ist es mit dem Kontakt “D-fault”: Die Diode D1 (1N4007) sorgt dafür, das der negative Anteil des Pilotsignals weggeschnitten wird. Anhand dieses Signals erkennt die Wallbox, das tatsächlich ein Elektroauto angeschlossen ist — und der Stecker nicht einfach nur im Regen hängt. Wenn man “D-fault” also schließt, wird die Diode überbrückt und der negative Anteil des PWM-Signals verändert sich analog zum positiven Anteil. Auch hier darf die Ladestation den Ladevorgang nicht freigeben.
Die restlichen Kontakte schalten Widerstände etc. zwischen CP und PE hinzu. Normalerweise trennt der Schalter in der Position “A” alles von CP und PE, es gibt keine Verbindung. Wechselt man nach “B”, so wird die Diode zusammen mit R1 (2k7 Ohm, min. 0,5 Watt) eingeschleift. Das signalisiert der Wallbox, das ein Elektroauto angeschlossen ist — und das der Zustand B erreicht ist. Schließt man “C”, so wird der Widerstand R2 (1k2, min. 0,5W) hinzugefügt und die Ladestation kann den Ladestrom aktivieren.
ACHTUNG: Netzspannung kann tödlich sein. Der Fahrzeugsimulator darf nur von Elektrofachkräften aufgebaut werden. Die im nachfolgenden dargestellten Aufbauvarianten sind nur als Denkanstoß zu verstehen und dienen nicht als Bauanleitung für betriebsfertige Geräte. Insbesondere hafte ich nicht für alle Schäden, die durch den Einsatz dieser Schaltung entstehen!
Die Platine kann für unterschiedliche Anwendungszwecke eingesetzt werden. Ich zeige hier den Aufbau eines Funktionstesters für Ladestationen, da alle Funktionen der Platine genutzt werden. Für alle Aufbauten gilt: Die elektrische Sicherheit ist durch die Verwendung dieser Platine nicht zwangsläufig sichergestellt. Wer nicht über die notwendigen elektrotechnischen Kenntnisse verfügt sollte einen Elektrofachbetrieb konsultieren! Unter anderem die folgenden Aspekte müssen bedacht werden:
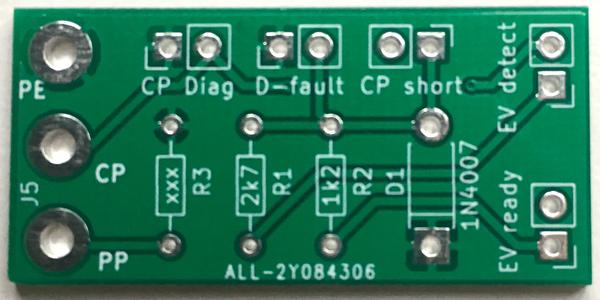
Für alle Aufbauten gilt: Die Widerstände und die Diode müssen eingelötet werden. R1 (2k7 Ohm) und R2 (1k2 Ohm) sind bei jedem Aufbau gleich. Der Wert für R3 richtet sich nach der Strombelastbarkeit des Komplettsystems. Will man z.B. maximal 13A entnehmen, so lötet man einen 1k5 Ohm Widerstand an die Anschlüsse für R3. Bei der Diode muss darauf geachtet werden, das sie richtig herum eingelötet wird — der Strich auf dem Diodengehäuse muss in die gleiche Richtung zeigen wie auf der Platine markiert. Das folgende Bild zeigt die Version 0.2 der Schaltung:
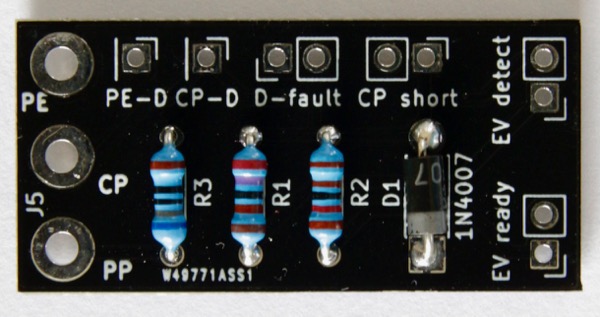
Das Layout der Platine hat sich mit Version 0.5 geringfügig geändert — die Diode ist nun an einem anderen Platz. Beim Aufbau also bitte immer auf den Bestückungsdruck achten! Mit diesem Grundaufbau kann es nun je nach Anwendung weitergehen.

Als Gehäuse hat sich das Bopla ET 215 bewährt. Für dieses Gehäuse kann man hier auch eine Bohrschablone herunterladen (PDF). Am Besten mit einem kleinen Bohrer (3mm) vorbohren und mit einem Stufenbohrer das Loch auf den passenden Durchmesser bringen:

Die Kabelverschraubungen bilden die Zugentlastung für die Kabel. Im Inneren kann man dann z.B. mit Wagoklemmen die einzelnen Leiter verbinden:
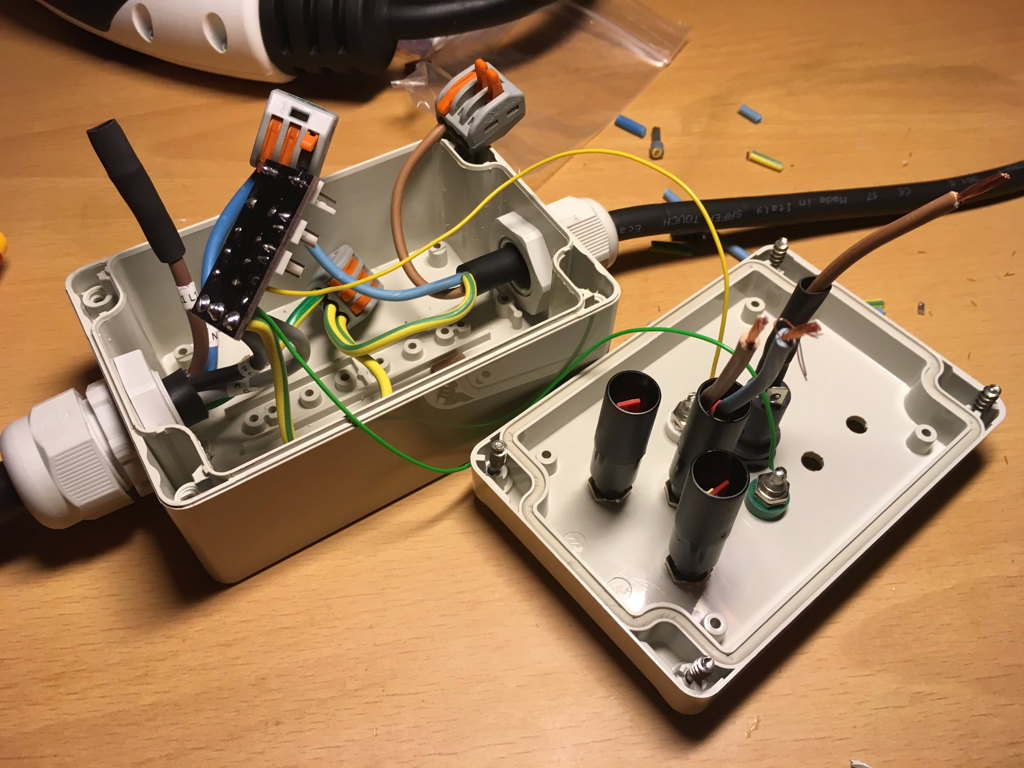
An die Anschlüsse CP-D wird eine Messbuchse für CP, an PE-D die Messbuchse für PE angeschlossen. Vom Ladekabel werden nun PP, CP und PE an die Platine gelötet. Hierfür muss man gegebenenfalls eine dünnere Litze über eine Wagoklemme o.ä. mit dem dickerem Schutzleiter verbinden. Die Glimmlampe installiert man zwischen den Außenleitern und dem Neutralleiter.
Wenn man eine Drehstrom- oder Schukokupplung installiert kann man darüber auch einen RCD-Test durchführen und das Drehfeld kontrollieren. Außerdem kann man natürlich auch ein Gerät an den Simulator anschließen. Da aus einer Typ2-Steckdose mehr Strom entnommen werden kann, als eine Schukokupplung maximal zur Verfügung stellen darf, muss in diesem Fall unbedingt eine Sicherung vorgesehen werden. Dazu eignet sich z.B. ein Leitungsschutzschalter (A-Charakteristik) oder eine flinke Schmelzsicherung. Der Auslösestrom muß der Dauerbelastbarkeit der schwächsten Komponente entsprechen: Bei einer Schukokupplung sind das 13A, bei einer einphasigen CEE-Kupplung 16A.
Es fehlen nur noch die Kippschalter — über diese kann man verschiedene Fehler und Fahrzeugzustände simulieren. So kann auch ein kurzgeschlossener CP oder ein Diodenfehler simuliert werden. Außerdem zeigt eine oder mehrere Glimmlampe an, ob ein Ladestrom an der entsprechenden Phase anliegt. Um die Fehlersuche zu erleichtern kann man auch Messbuchsen für den Anschluss eines Multimeters oder Oszilloskops vorsehen.
Für einen sauberen Aufbau nutze ich die Kippschalter MS500A (Reichelt-Link) mit angelöteten, zweipoligen Platinensteckverbindern (Reichelt-Link):
Bei diesen Kippschaltern muss man jedoch darauf achten, das im Innern des Autosimulators keinesfalls ein Kontakt zur Netzspannung entstehen kann. Sicherer ist es, einen Kippschalter der Schutzklasse II zu verwenden, d.h. es kann keine Netzspannung zum Anwender gelangen.
Die Kippschalter werden wie folgt verdrahtet:
| Text | Anschluss | Funktion Kippschalter | Ladestrom |
|---|---|---|---|
| D-fault | J1 | Test Diodenfehler | aus |
| A/B, EV detect | J2 | Fahrzeug angeschlossen (R1) | aus |
| E, CP short | J3 | Test CP Kurzschluss | aus |
| C, EV ready | J4 | Fahrzeug ladebereit (R2) | ein (falls J2 ein) |
Ladestationen sind Bestandteil der Niederspannungsinstallation und müssen gemäß der VDE 0100-600 geprüft werden. Die Prüfung kann in drei Bereiche unterteilt werden: Sichtprüfung, Messung und Funktionsprüfung. Innerhalb einer Ladestation sind auch Sicherheitsfunktionen umgesetzt: Ein Teil der Messungen kann also nur während eines Ladevorgangs durchgeführt werden. Daher benötigt man zur Prüfung einen Fahrzeugsimulator.
Jede Prüfung beginnt mit einer Sichtprüfung: Ist das Gehäuse beschädigt? Könnte Wasser in die Ladestation gelangt sein? Ist die Isolierung der Kabel brüchig/beschädigt? Sind andere Gefahren erkennbar? Im Anschluss kann mit den Messungen begonnen werden:
Einige dieser Messungen müssen am Fahrzeugstecker unter Spannung durchgeführt werden. Indem man den Fahrzeugsimulator in den Zustand C bringt kann man diese mit dem normalen Installationstester durchführen. Man misst also während des Funktionstests. Der Funktionstest selbst beginnt mit dem Simulieren eines normalen Ladeablaufs (vgl. Abschnitt “Der Control Pilot (CP)” bezüglich der Zustände):
Dieser grundlegende Ablauf sollte bei jeder Ladestation problemlos funktionieren. Zusätzlich sollte man die folgenden Messungen durchführen:
Der letzte Test ist umstritten: Die DIN 61851-1:2012 bietet hier einen gewissen Interpretationsspielraum, ob der Diodenfehler nur zu Beginn des Ladevorgangs (Zustand A) oder auch in den anderen Zuständen permanent detektiert werden muss. Die Hager-Ladestationen überwachen permanent. Die Ladecontroller von Phoenix Contact und die Keba-Ladestationen führen den Test lediglich im Zustand A, also zu Beginn des Ladevorgangs, durch. Im goingelectric-Forum gibt es dazu mehr Informationen.
Achtung: Ich habe bereits TÜV-geprüfte Wallboxen eines chinesischen Herstellers untersucht, die weder auf “CP short” noch “Diode fault” prüfen. Sobald ein passender Widerstand zwischen CP und PE liegt wird der Drehstrom angeschaltet. In meinen Augen ist das hochgefährlich. Man sollte also die korrekte Funktion unbedingt prüfen und sich nicht auf ein TÜV-Siegel verlassen!
Weiterhin sollte man prüfen, ob Ladekabel mit zu kleiner maximaler Strombelastbarkeit von der Ladestation abgelehnt werden. Beispielsweise sollte ein Ladekabel mit 13A maximaler Belastbarkeit von einer mit 20A abgesicherten Ladestation abgelehnt werden. Ansonsten könnte bei einem Fehler das Kabel überlastet werden, ohne das der Leitungsschutzschalter der Ladestation auslöst.
Als letztes muss auch der Dutycycle des Control Pilots überprüft werden, da dieser den maximalen Ladestrom der Ladesäule dem Auto mitteilt. Mit einem Oszilloskop oder Multimeter zwischen CP und PE misst man dafür den Duty Cycle und kann diesen dann in den Ladestrom umrechnen. Das folgende Bild zeigt eine Ladestation von Hager im Zustand C:
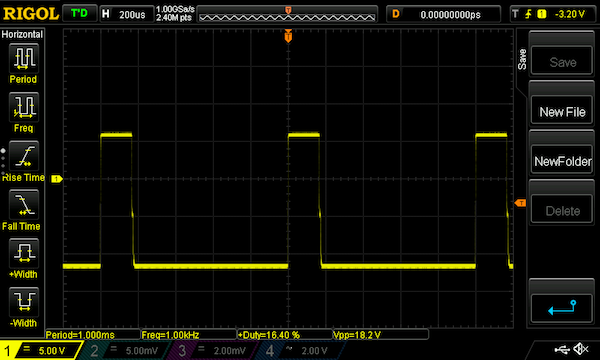
Man kann ein Rechtecksignal mit einer Grundfrequenz von 1kHz erkennen. Das positive Spannungsniveau liegt bei 6V, das negative bei -12V. Der Duty Cycle liegt bei 16.4%. Es gilt:
\[ Strom [A] = 0.6\cdot dc = 0.6 \cdot 16.4 = 9.83 \]
Das entspricht in etwa der hier eingestellten Ladestrombegrenzung von 10A, d.h. die Ladestation arbeitet korrekt.
Für Z.E. Ready-Ladestationen gelten zusätzlich noch die Bestimmungen von Renault. Einerseits muss die Ladestation konstruktiv diese Vorgaben erfüllen (z.B. DC-Fehlerstromerkennung und die Dimensionierung der Leitungsschutzschalter), andererseits muss auch die Installation gewisse Anforderungen erfüllen. Dazu gehören:
Die Relevanz dieser Kriterien ist allerdings umstritten, siehe diesen Thread im Goingelectric-Forum.. Im Wiki von Goingelectric werden außerdem die technischen Mindestvoraussetzungen für das Laden einer ZOE 210 diskutiert.

Mit diesem Adapter kann man einen Wohnwagen oder Caravan an eine Ladestation anschließen, um z.B. während einer Reisepause Strom im Fahrzeug zu haben. Der grundlegende Aufbau entspricht dem Ladesäulentester oben, wobei auf die Testschalter für den CP-Test (J1 und J3) verzichtet werden kann. Ebenso kann man auf den Schalter J4 (EV ready) verzichten: Dieser signalisiert die Ladebereitschaft, sobald der Adapter angeschlossen ist. Den Schalter ersetzt man einfach durch eine Drahtbrücke. Dies hat allerdings den Nachteil, das die Ladestation — je nach verwendetem Laderegler — den “simplified mode” annimmt und nur 10A Ladestrom freischaltet. Keinesfalls darf man allerdings auf den Schalter J2 (EV detect) verzichten: Ansonsten kann es passieren, das man die Verriegelung des Steckers nicht wieder lösen und das Kabel nicht aus der Ladesäule gezogen werden kann.
Da aus einer Typ2-Steckdose mehr Strom entnommen werden kann, als eine blaue CEE-Steckdose maximal zur Verfügung stellen darf, muss unbedingt eine Sicherung vorgesehen werden. Dazu eignet sich z.B. ein Leitungsschutzschalter (16A, A-Charakteristik) oder eine flinke Schmelzsicherung (16A). Diese muss in die Außenleiter integriert werden. Ebenso muss man — entgegen dem Bild oben — auf die Wetterbeständigkeit achten. Man sollte also einen IP65-Schalter und ein entsprechendes Gehäuse mit geeigneten Kabeldurchführungen verwenden.
Die Designdaten (und diese Anleitung) sind Open Source und unter https://github.com/gonium/EVSE-Car-Simulator verfügbar. Die Schaltung kann man natürlich recht schnell auf einer Lochrasterplatine aufbauen. Wer lieber einen kleinen Bausatz haben möchte, kann diesen bei mir bestellen. Der Bausatz enthält:
Das Ganze kommt — zusammen mit einer Rechnung — so bei Euch an:

Der Bausatz kostet 9 Euro, der Versand innerhalb Deutschlands bei kleinen Mengen 3 Euro — bei größeren Mengen entsprechend mehr. Zum Bestellen einfach eine Mail an schreiben. In der Mail bitte
Ich schicke direkt eine Auftragsbestätigung mit den Informationen für eine Überweisung. Ich akzeptiere kein Paypal. Sobald das Geld bei mir eingegangen ist verschicke ich zeitnah — natürlich mit einer Rechnung.
Ich habe einen Fehler gefunden.
Für Hinweise auf Fehler etc. bin ich dankbar. Am liebsten sind mir Fehlerreports via Github: Hier kann man ein Issue aufmachen. Eine Mail ist aber auch vollkommen OK.
Was ist der Unterschied zwischen v0.5 und den vorherigen Versionen?
In der Schaltung hatte sich ein kleiner (doofer) Fehler eingeschlichen, der dafür sorgte, das der Ladeablauf eigentlich im sogenannten “simplified mode” angefragt wird. Das führt je nach verwendetem Laderegler dazu, das die Ladestation nur einen Ladestrom von 10A freigibt. Mit der v0.5 habe ich diesen Fehler behoben. Die Bauteile sind auf der Platine nun etwas anders angeordnet, aber an den Abmessungen oder dem Platzbedarf hat sich nichts geändert.
Ausserdem habe ich den Bestückungsdruck verändert. Statt “EV detect” steht nun “A/B”, statt “EV ready” steht “C”, und statt “CP short” steht “E” auf der Platine. Damit ist es einfacher, die Schalter den Zuständen laut Standard zuzuordnen.
Kannst Du mir nicht ein fertiges Gerät verkaufen?
Momentan gilt: Leider nein, aus Haftungsgründen. Jeder ist für seine Aufbauten selbst verantwortlich.
Kannst Du mir nicht Schalter, Buchsen usw. verkaufen?
Ich hab das mal angeboten — leider ist die Nachfrage aber so gering, das sich das nicht lohnt. Insofern: Leider nein.
Warum ist der Bausatz so teuer?
Wenn Du lediglich den Materialwert zugrunde legst kann ich die Frage gut nachvollziehen. Nimm einfach das passende Zeug aus Deiner Bastelkiste und bau die Schaltung nach, das ist OK so. Andererseits habe ich recht viel Zeit in die Dokumentation und die Entwicklung einer einfachen, gut lötbaren Platine gesteckt. Die Platine muss gefertigt werden, die Bauteile müssen bestellt und zusammen mit der Platine verpackt werden. Auch Rechnung schreiben und die ganze Verwaltung machen erstaunlich viel Arbeit.
Mit anderen Worten: Ob es Dir das Geld wert ist musst Du selbst entscheiden!
Warum nur Vorkasse? Kann ich nicht via Paypal etc. bezahlen?
Im Moment nehme ich nur Zahlungen via SEPA-Überweisung im Voraus an. Das hat hauptsächlich den Grund, das so meine Arbeit überschaubar bleibt und keine Transaktionsgebühren anfallen. Leider musste ich schon meinem Geld hinterherrennen — und dazu hab ich schlichtweg keine Lust.
| Wann | Was |
|---|---|
| 2019.01.03 | V0.5: Fehler simplified mode behoben, neues Layout |
| 2018.01.25 | V0.3: Anschluss für Diagnose (CP/PE) im Rastermaß 2,54mm |
| 2017.09.09 | V0.2: Bohrungen für CP/PP/PE vergrößert |
| 2017.09.04 | V0.1: Initiales Layout |